「軽くて持ち運びが容易、それでいてたくさんのカメラを同架できて、高精度に星を追尾することのできるポータブル赤道儀が欲しい」と思ったのは1999年のしし座流星群の直前でした。仕事直前までに自宅に帰還可能な距離の観測地で雲の切れ間を探してある程度移動することを想定した機材コンセプトでした。
ビクセンやケンコーから優秀な「ポタ赤」が販売されている中、自作派の私としてはそれらを超える「特徴」を備えた簡易赤道儀を作ることにしました。
所詮素人作りの「自作赤道儀」ですが、選んだ赤経軸、駆動モーター、ギヤ系、などは機械部品としては精密級、電子回路に用いる水晶発振子は恒星時駆動用に周波数指定の特注品を使用しています。


自作したポータブル赤道儀は2台、中型のアルミケースに収納して持ち運びをします。アルミケースの中には赤道儀ユニットが2台、カープラグから12Vを取るための40mの電源ケーブル(リール巻き)と駆動・ヒーター分配器、極軸望遠鏡、カメラマウントと取り付けプレート、それにレンズに霜が付着するのを防止するためのヒーター類などが収納されています。

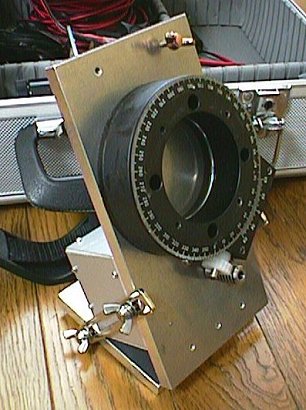
ポタ赤の全景です。回転ユニットを固定しているジュラルミンプレートの寸法は100×200×10mmです。ベースプレートは100×100×10mmでこれには三脚用のマウントねじが切ってあり、丈夫な三脚に固定して使うことになります。高度合わせは三脚のヘッドのほうで合わせることになりますが、赤道儀のプレートの斜め金具でも高度を変えることができます。
極軸望遠鏡はビクセンのSP赤道儀のものです。レチクルパターンは古いものですが、そこは『ポタ赤』、シビアな極軸合わせは必要としません。
駆動・ヒーター分配器には2台の『ポタ赤』用の電源コネクタ、3個のヒーター電源 (これはそれぞれのヒーターに供給する電力制御ができるようになっています)、それに輝度調整ができる赤色LEDが付いています。


極軸望遠鏡は写真のように取り付けます。極軸設定が終わったら取り外してしまいます。取り付け用の蝶ねじはカメラマウントを赤経回転部に取り付けるねじと共用です。
カメラマウントを同架するプレートは写真のような2連カメラに対応する30×350×5mmのアルミプレートとカメラ1台用のプレートを用意しました。

PENTAX67カメラもこのように載せることができます。
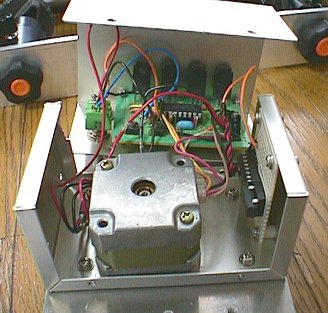
モータードライブは恒星時駆動のみです。モータードライバは短期間で製作するために電力制御の部分に秋月電子のステッピングモーター制御キットを流用することにして、恒星時駆動をするための発振回路は精度的に問題のある基板上のCR発振回路を使わずに恒星時駆動用として特注した水晶発振子を基準クロックにした分周回路を用いました。
ステッピングモーターは1.8度/ステップ、主軸の両端にラジアルボールベアリングの入った高精度品を使っています。


モーターの軸と赤経ユニットのドライブ軸に直接ウォーム/ホイールを取り付けて駆動しています。減速比は16:1、極軸体のユニットは歯数180のウォーム・ホイールギアユニットです。簡易な動力伝達系ですが「遊び」が少ないので高精度な追尾が可能です。
簡易な『ポタ赤』ですからモーターの制御回路システムは恒星時以外の速度を選択することはできません (分周回路の内部ではいくらでもできるのですが)。ただ、将来遠征するかもしれない南天の星を追尾できるように回転方向の選択スイッチだけは付けました。
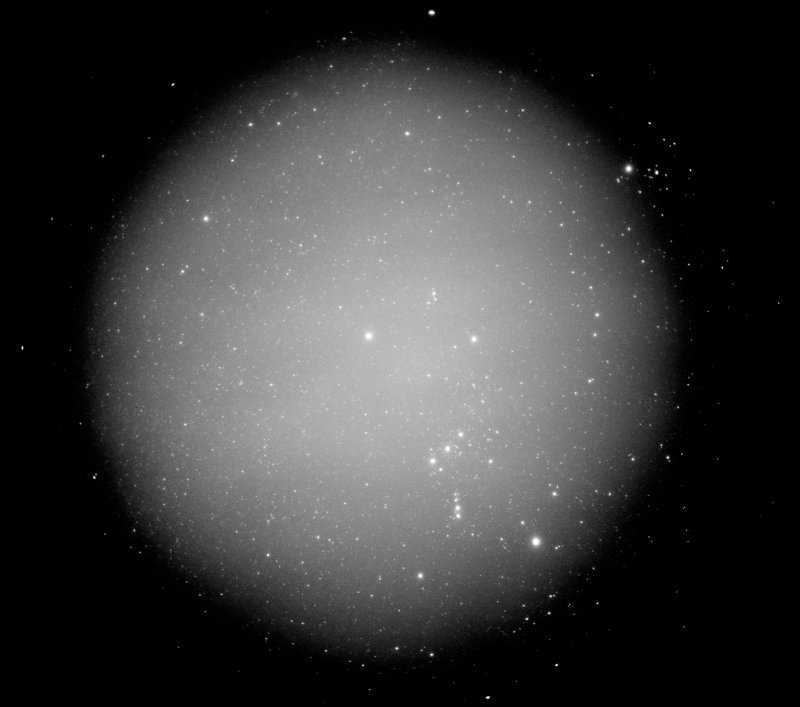
写真はこのポータブル赤道儀に自作4×5カメラを同架して30分間露出をしたオリオン座周辺です。撮影に使用したレンズはPENTAX67の105mm*F2.4をF2.8に絞って使用しています。
写真からお分かりいただけると思いますが、30分間の『完全放置露出』でも追尾エラーは生じていませんので、それなりに高精度追尾可能なシステムであることが確認されました。
機材の自作コーナーに戻る
