1. はじめに
VIXENのスカイセンサー2000PCやMEADEのオートスター自動導入システムは組み込み型マイコンを用いた「高機能追尾システム」で、その実力は天文各誌の機材レポートなどでも絶賛されている優れものであります。また、アマチュア向けの大型赤道儀においても数100倍速の高速モードやマイクロステップ動作のステッピングモーターあるいはDCサーボモーターの採用、PEC機能や大気補正機能の実装などを盛り込んだ追尾システムが標準的なシステムとなりつつあり、赤道儀の追尾システムは産業用ワンチップマイコン技術の進歩とともに高機能化・高性能化が急速に進んでいるといえます。
このような組み込み型マイコンを搭載した自動導入・追尾システムでは電子回路技術よりもマイコンのソフトウエア開発技術の方により多くの時間とコストがかかります。従って、販売台数が出るシステムほど低価格で高機能な製品が提供されることが特徴です。
自作派を自称する方々もこれらの高機能・高性能な市販システムを無視して赤道儀の追尾システムを自作したところで最近の市販追尾システムを超える機能を達成することは困難であり、製作時間やコストパフォーマンスの面からも追尾システムの自作についてはあまり意味がなくなってしまったようにも思えます。
これまでにも何種類かの赤道儀用追尾システムを製作したことのある30数年来の機材自作派である筆者も、新たな追尾システムをどのようなものにするかということでは大いに悩むところであったのですがそこは「自作派」、市販システムのような「機能の多彩さ」ではなく、「簡易で高品位な追尾」のできる基本機能重視の追尾システムを目指して新規モータードライブの製作にチャレンジしました。
2. 今回製作した追尾システムのコンセプト
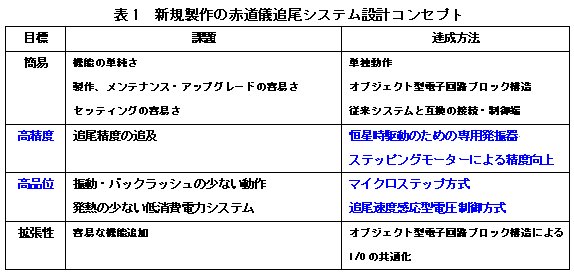
表1は今回製作した追尾システムの設計時点でのコンセプトを示したものです。
現在モータードライブとして利用可能な動力源はDCサーボモーターとステッピングモーターにほぼ絞られます。(場合によってはACサーボモーターも考えられないことはないのですが、精度の面で望遠鏡のモータードライブには不向きと思われます)
DCサーボモーターは極低速から高速動作まで広いダイナミックレンジと安定したトルクを得ることができるすばらしい動力源で、最近の高速導入システムに好んで使われています。しかし、実際の回転を検出しながら負帰還をかけるこの方式では『微小時間域での回転ムラ』を避けることは困難です。
一方、ステッピングモーターは低速域でのトルクの大きさと確実なステップが得られることによる動作の正確さが最大の利点です。ただ『ステップ動作』のために低いギア比の場合には追尾に振動が発生することと、回転数が高くなるにつれてトルクが低下するという本質的な問題が存在します。
赤道儀のモータードライブを製作するに当たっては、このような動力源の特性を考慮した上で目的とする天体の追尾に適したモーターを選定しなければならないと言えます。
概論的に言えば、深宇宙を探訪するような用途に用いる場合には離れた場所の天体を効率よく導入できなければなりませんからDCサーボモーターのような高速回転の得意なものを、惑星など高倍率の必要な天体を長時間高精度で追尾する目的には多少大きなギア比の減速器を取り付けたステッピングモーターが適しているものと思われます。
今回製作するモータードライブは、埼玉県南部の自宅(北極星すら見えにくい光害環境)で月や惑星の観測と写真撮影をするためのものという目標設定ですので、高速移動よりも常に一定な追尾を可能にする動力源としてステッピングモーターを選定することにしました。しかし、ステッピングモーターにギア比の大きな減速器を取り付けてステップの刻みを細かくするだけではこれまで使ってきたモータードライバ(写真1
: しかしこれでも追尾速度自由設定といった『他にはない特徴』は備えているのですが) と同じになってしまい面白みがありません。

そこで、今回製作するモータードライバでは『マイクロステップ駆動方式』を取り入れて電子的に刻みを細かくすることと、高速回転領域で低下するトルクをサポートする機能を回路設計に盛り込むことにしました。そして、肝心の発振周波数は回路で分周したときに正確に恒星時駆動となるような周波数の水晶発振子を特注製作してもらうことにしました。
また、電子回路はマザーボードとそれに載せる機能別ドータカード方式として将来の拡張性や機能見直しの場合の交換性、メンテナンス性などの容易なオブジェクト型回路ブロック構成をとることにしました。
3. モータードライブ回路の概略設計
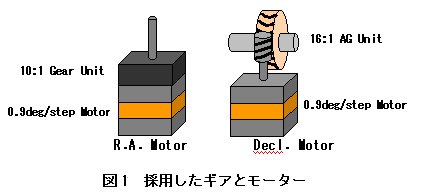
さて、コンセプトが決まったところで具体的な電子回路設計です。今回製作するモータードライブには図1のようなモーターを使うことにし、赤道儀のウォーム・ホイールギアは180:1、360:1、720:1のものに2進の分周設定変更だけで対応するように設計しました。
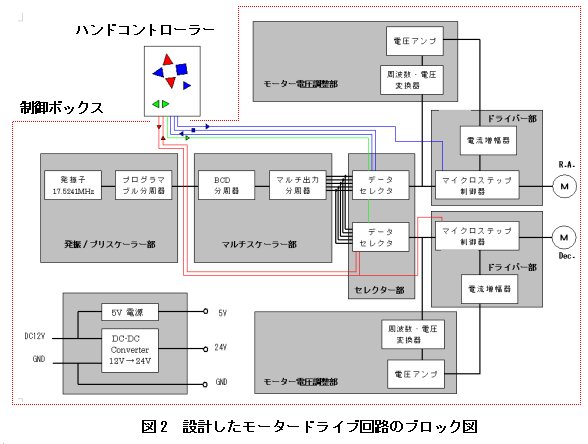
図2はモータードライバのブロック図です。以下、その機能について説明します。
(1) ステッピングモーターを駆動する基準周波数は2進分周するだけで恒星時駆動の周波数となる特注品の17.5241MHz水晶発振子とプログラマブル分周器を使った発振/プリスケーラー部で発生する(プログラマブルプリスケーラーを用いた理由は、赤道儀のウォーム・ホイールギアの歯数が必ずしも180:1の倍数でなくても対応可能とするため)
(2) プリスケーラー部である程度まで分周した基準周波数を更に分周器にて分周して更にマルチ出力分周器で等速、2倍速、4倍速、・・・、64倍速周波数を作り出し、その中から必要な4周波数(例えば、[停止]、[1倍速]、[2倍速]、[16倍速])を選択する
(3) セレクタ部はハンドコントローラーからの信号に従って4周波数から必要な周波数をデータセレクタで選択してドライバ回路に送り出す
(4) データセレクタからの出力信号を2分割し、一方をモーター電圧制御部に導入する。モーター電圧制御部ではドライブ周波数に応じて周波数→電圧変換し、電圧アンプで電力増幅してドライバ部にモーター電源として供給する(周波数に対する供給電圧はこの回路の増幅率で調整できる)
(5) ドライバ部はマイクロステップ制御器によってセレクタ部から出力された周波数でモーターを駆動するが、モーターの駆動電圧はモーター電圧制御部で電圧増幅された値となる
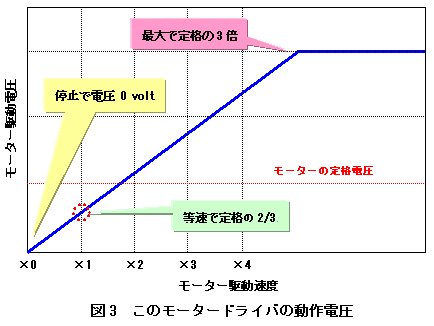
図3はこのモータードライバの動作モードと駆動電圧を示したものですが、恒星時駆動といっても実際には定格回転数よりもずっと低回転数で追尾していますのでモーターの定格電圧を与える必要はありません。赤道儀を恒星時駆動で動かしておいて、電圧を徐々に絞って行き、モーターが回転しなくなった電圧の1.5倍程度の電圧に設定すればそれよりも高速モードで十分なトルクが得られるようになります。また、一般のステッピングモータードライバでは回転停止のときに最大の電流が流れますが、この回路では文字通りモーターへの供給電圧はゼロボルトになりますのでモーターや回路への負荷が圧倒的に軽減されることになります。
実際にFS2.0でこのモータードライブ回路を動かした場合(供給電圧12V)、恒星時駆動の時の電流は0.6A(7.2W)、2倍速時の電流は0.6A(7.2W)、16倍速の時の電流が0.7A(7.4W)で、必要なモーター駆動域全域を等しい消費電力でカバーすることができます。
4. 回路の製作 (部品の選定と材料集め)
製作する電子回路のコンセプトが決まったところでいよいよ回路の製作開始となります。
回路製作に当たっては数あるICの中から目的とする機能を持ったものを選び出さなければなりません。
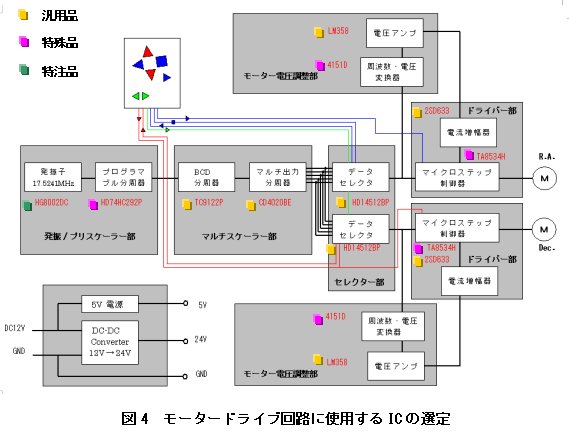
図4は今回製作した回路に用いたICの名称を示したものです。図中の汎用品はTTLICとして流通しているもので『74シリーズIC規格表』などに機能や形状、ピンアサインなどが示されていますので、それらの中から周波数特性などを考慮して適当なものを選定しました。もちろん『汎用品』ですから秋葉原などの電子部品屋さんを数軒探せば確実に入手できるものです。
図中の特殊品は用途の限られた専門的な機能を持ったICです。それだけに欲しい機能にぴったり適合した製品が存在するとは限りません。雑誌やメーカーのサイトなどでさまざまな製品情報から最も要求に近い機能のICを探すのですが・・・これがまた電子回路設計の醍醐味の一つでして、本当に要求にぴったりのICが見つかったときの嬉しさは経験者でなければ判らないでしょう。そしてもう一つ、せっかく最適なICの情報が見つかっても、必ずしも容易に入手できないのも多いのです。何せ『特殊品』ですから市中に出回っている数に限りがありますので・・・。秋葉原で馴染みのパーツ屋さんを『蝶々さん』しながらこれを探し回るのもまた楽しいひと時です。
図中の特注品はもちろん専用にカスタマイズしてもらう部品のことで、今回お願いをした水晶発振子はセイコーエプソンのHG8002DCという型番のプログラマブル水晶発振子でした。このICはメーカーに周波数を指定すればその周波数になるように内部データを書き込み、周波数調整・確認されたものが納入されます。私の場合は17.5241MHzの恒星時駆動用に調整してもらったものを10個まとめて購入しました。1個の価格は確か2000円くらいでした。
この回路を駆動する電源は屋外での移動使用を考慮して自動車の12V電源利用をベースに考えることにしました。自動車のDC12Vはエンジンがかかっているときは大変にノイズが多い電源なのでこのような回路に供給する場合には『安定化』が不可欠です。そこで、TTLIC用の5V電源、モーターへ供給する24V電源ともにDC-DCコンバーターを介した安定化電源を用意することにしました。5V電源は1.0A定格のもの、24V電源は電流の十分に取れる適当なものがなかったので12V・2.0A定格のものをカスケード接続することにしました。
また、オブジェクト型回路ブロック構成とするために図4のようなブロック毎に異なる基板上に回路を製作して、マザーボードを介して一体化する方式をとることになるので、ブロック用とマザーボード用のユニバーサル基板と接続用のターミナルピン、各種コネクタやボックス、配線材料などの手元にない材料を購入しました。
5. 回路の製作 (電子回路の組み立て)
電子回路の製作ではそれぞれのブロックの特性に合わせた製作上の留意点があります。高周波を取り扱う発振回路ではグラウンド処理を完全にしなければ誤発振などの問題が発生する可能性が高くなりますし、パワー回路では電力増幅段の発熱対策が重要になります。
オブジェクト型回路ブロック構成の方式ではそれぞれの回路基板の中で必要な対応をとることができますのでトラブルの発生確率を低減することが比較的容易な制作方法といえます。
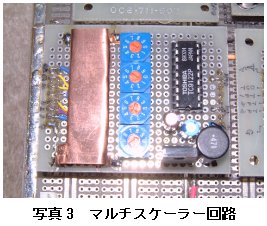
写真2は発振/プリスケーラー回路です。この回路は17.5241MHzの高い周波数を取り扱うので、回路基板の裏側パターンではできる限り多くのグラウンドを取るようにしてあります。
写真3はマルチスケーラー回路です。この回路では製作した後で4020マルチ出力分周器が外乱ノイズで誤動作しやすいことが判りましたので写真のように銅版でIC外側を囲ってしまうような電気的シールドを追加して安定な動作を確保しました。
写真4はデータセレクタ回路です。この回路ではR.A.とDecl.の2つのチャンネルを1枚の基板に納めました。
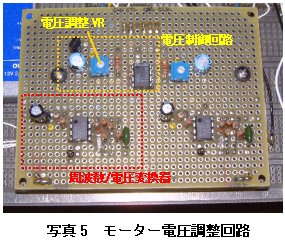
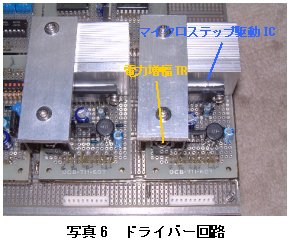
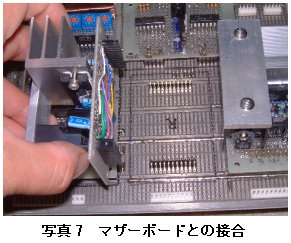
写真5はモーター電圧調整回路で、R.A.とDecl.の2チャンネル分を一つの基板にまとめています。この回路では入力信号パルス1個につき1ショットの短いパルスを発生させてそれを積分しながら時間微分しています。実際のところ積分用のコンデンサと微分用の抵抗の値が適当でないと出力電圧に入力信号と同周期の電圧振動が乗ってしまいますのでメーカー推奨の回路パラメーターを再検討してこのシステムに適したパラメーターに変更しています。周波数/電圧変換器で電圧変換された信号は電圧制御回路でモーターをドライブする電圧に増幅しますが、電圧増幅率は回路上の電圧調整ボリュームで任意倍率に調整することができます。
写真6はドライバー回路です。この回路上にはマイクロステップ駆動ICと電力増幅用のトランジスタがあります。どちらの半導体もパワー制御用のものですからモーターの負荷によってはかなり発熱をします。そこでこの回路では写真のようにヒートシンクを設けて1A程度のモーター電流が流れる場合であってもそれぞれの半導体の冷却が十分にできるように配慮してあります。
写真7は製作した回路をマザーボード上に実装する接続方法を示したものです。電力回路など電流を多く流す配線の接続にはデュアルピンのコネクタを用いて信頼性の向上を図っていますが、デュアルピンのコネクタは基板の確実な接合にも大きな効果があります。
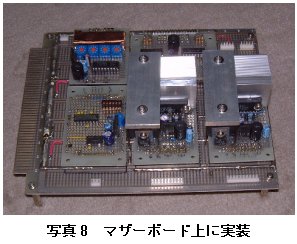


写真8は全ての回路をマザーボード上に載せたところです。写真では確認できませんが、スペースの関係で電源回路とモーター電圧調整回路はマザーボード裏側に実装しています。
写真9は出来上がった回路をボックスに収納したところです。ボックスはアルミダイキャスト製のもので、シールド特性と耐水性に優れたものを選定しました。
ボックス内部には『念のため』空気循環用のファンを設けてパワー制御系に取り付けたヒートシンクの強制空冷をしています。
また、外部コネクタと基板を接合する基板上のケーブルコネクタ類は最も信頼性の要求される部分です。過去に安価なコネクタを利用したら10年くらい使ったところでコネクタ内部のりん青銅製の金具が折れてしまうトラブルを経験したことがありますので、ここでは信頼性の高い日圧製のコネクタを採用しました。
写真10は完成したモータードライバの全景です。現在のところ、PCによる自動導入や100倍速以上の高速導入には対応しておりませんのでビクセンやミードの最新型のPC対応モータードライバと比べると図体の割りに低機能のモータードライバに見えるかもしれませんが、ステッピングモーターの確実性とマイクロステップ動作によるDCモーター並みの滑らかな回転が得られることを考えると安心して使うことのできるモータードライバであるといえます。
6. おわりに
実はこのモータードライバは2000年に完成して、これまでもずっとSuperNova赤道儀の恒星時駆動に利用してきたものです。もちろんSuperNova赤道儀でも最大限の精度を発揮して星を追尾してくれていました。
機材の自作コーナーでご紹介いたしました『Friendship2.0赤道儀』を2003年9月に完成させてからはこの赤道儀の駆動用として運用に当てています。SuperNova赤道儀用とFriendship2.0赤道儀用に切り替えるにはマルチスケーラー基板上に付いている4個の10進SWの値を変更するだけで対応が可能です。
『Friendship2.0赤道儀』とこの『高品位モータードライバ』の相性はバツグンで、Friendship2.0赤道儀は音も振動もなく目的の星を追尾してくれます。
東京と埼玉の県境にある我が家では『光害』の影響がひどく、天体観測といっても惑星のような明るい対象が中心となります。それゆえ天体の自動導入などの機能を捨ててでも高倍率の惑星観測に対応してくれる確実かつスムースな追尾のできるモータードライバの価値は大きいものと思います。
もちろん、モータードライバの基本性能が優れていて、オブジェクト型回路ブロック構成のようなシステムの変更が容易な回路構成になっているのですから将来的なPC駆動モータードライバへのアップグレードもそれほど難しいものではないはずです。
このようなシステムのアップグレードについては時間ができたところで改めて考えたいと思っておりますので『乞うご期待』です。